広報部です。こんにちは。
本日はOpen Beta Labの定例会です。
こんばんば、ネットワークインフラ技術部のよつばです。
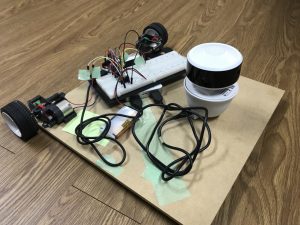
自走式〇〇ってただの板ですよね。(えーっとMDF…)板にチップとタイヤがくっついてる。ここにゴミ箱を載せれば自走式ゴミ箱の完成。
もしかしてカッコ悪い?、そんな疑問を払拭するため、あるラボメンは自走式〇〇の体を持参しました。体をすげかえればいいんです。ハガレンのアルだってただの鎧なので。

こんばんば、ネットワークインフラ技術部のよつばです。
先日とても感動したことがあったので、皆さんに共有したいと思います。
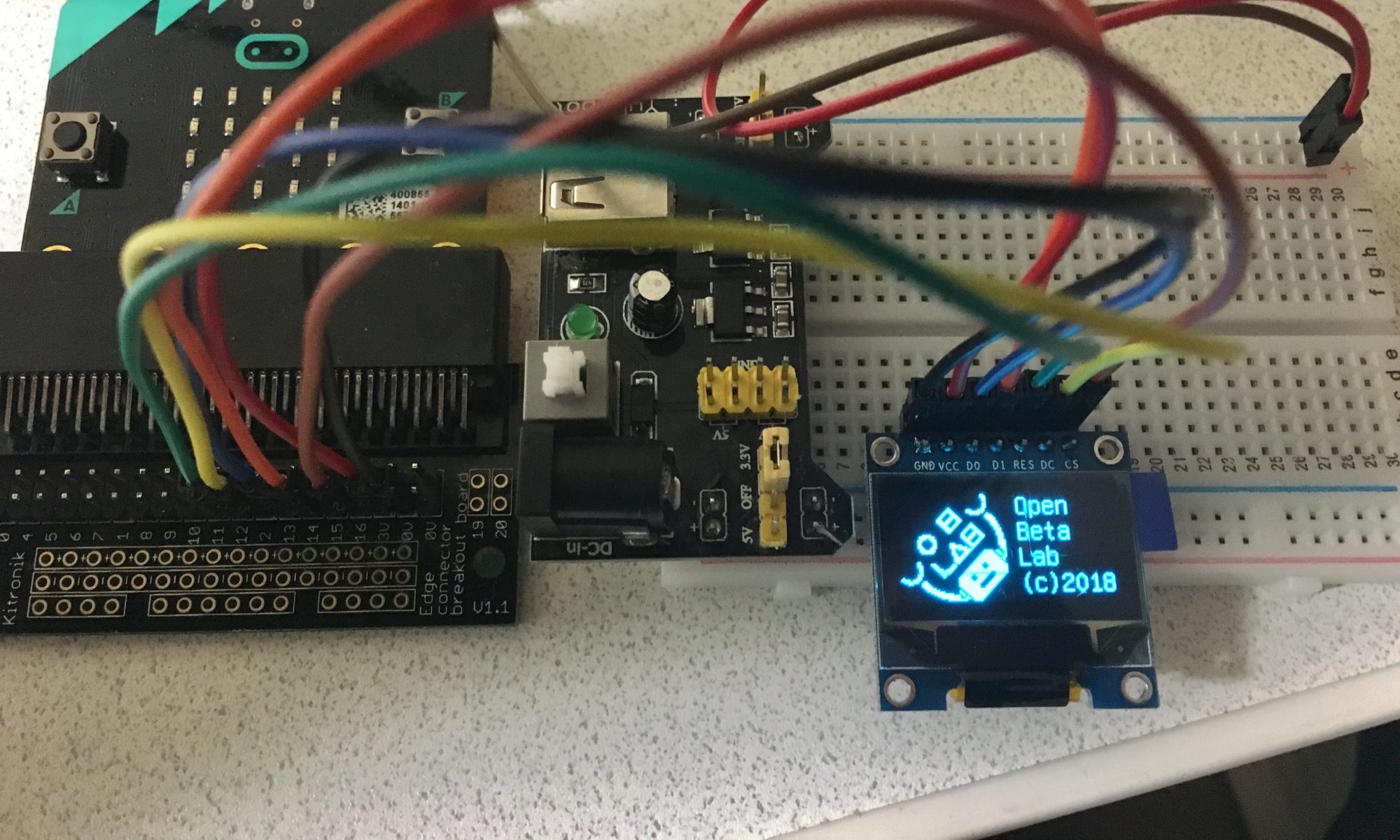
最近ラボ内で何かと話題の自走式〇〇には、ESPr Developer(エスパーデベロッパー)というものが載っています。このソフトウェアはラボメンが書き、Arduino Studioでコンパイルの後、USBケーブル経由でPCからbinファイルを転送して書き込んでいました。

自走式〇〇の制御方式は、内部にWebサーバが立っており、HTTPのGETメソッドでコマンドを送信しています。つまりブラウザから制御できるわけです。
そんなわけで、ラボのLANに入れれば無線LAN経由で自走式〇〇を制御できることになります。
ただ、ESPr Developerのソフトウェア更新をする際にはPCに繋ぐ必要があるので、ラボの外から更新するとなると、一旦だれかが自走式〇〇をPCに接続する必要があります。
その課題を、あるラボメンがトンデモナイ画期的な方法を見つけてきて解決しました。
広報部です。こんばんは。
Open Beta LabのブログがHTTPSに正式に対応しました。
ここに至るまでにちょっとしたゴタゴタがあったのでその経緯とともにご報告させていただきます。
こんばんば、ネットワークインフラ技術部のよつばです。
ラボメンがオシロスコープをラボに持ってきました。
オシロスコープなんて、大昔に理科か化学か電気工学で触ったっきりで全くわかりません。
“電気的な振動(=oscillation オシレーション)をスクリーンに表示する装置”(wikipediaより)
なんだそうです。ああそういえばsin波のようなものが見えたような。
なんでこんなもん持ってるんだよ!というツッコミもありますが、どういうときに使うんだろう。。。

